發布日期:2022-10-09 點擊率:170
引言
無刷直流電機因其構造簡單、無勵磁損耗、功率密度大以及控制效率高等優點,已廣泛應用于航空設備、交通運輸、工業過程控制等領域。BLDCM一般通過傳感器對轉子轉動位置進行實時檢測從而實現對其換向驅動,但當電機尺寸較小或受工作環境限制時,傳感器的使用就受到了很大限制,此時,無傳感器技術就成為一種最佳的選擇。反電動勢法是其應用最多、使用最普遍的方法,該方法是根據未導通相反電動勢的檢測得到定子繞組的換相時刻。分析了BLDCM轉速變化時換相誤差角度與反電動勢過零時間的數學關系,通過對換相時刻的修正,從而實現對電機的控制:綜述了在零速或低速時檢測轉子位置和閉環控制的幾種方法:考慮續流過程對線電壓估算的影響,提出了線電壓差法的控制方法。
狀態觀測器是根據外部變量,采用重構的方法對不能直接測量的變量進行估算,通過復制擾動以實現對擾動的完全補償。狀態觀測器由于控制方法簡單,無須另外增加硬件電路,在電機控制領域獲得廣泛應用,并得到了較好的應用效果,如滑模觀測器(sliding-Modeobserver,sMo)、MRAs觀測器、EKF觀測器、龍貝格觀測器等。滑模觀測器因其響應速度快、對外界擾動以及參數攝動自適應性強,且物理實現簡單、對系統模型要求不高,所以在電機控制中常用于估計電機的感應電動勢、速度、磁鏈與位置信息等。采用具有快速終端的滑模觀測器,由觀察到的反電動勢信息確定換相點,并計算出電磁轉矩瞬時值,加快了系統收斂速度:采用端電壓平均值設計的準滑模觀測器,通過估算出的線反電動勢信息計算出定子繞組電流的換相點:構建了一種具有較寬速度范圍的新型自適應滑模觀測器,并設計了邊界層可以根據速度的變化自適應調整的正弦飽和開關函數,在低速和高速情況下,通過合理選擇參數,準確估算出反電動勢、轉子位置與轉速等信息。
本文采用微處理器具有查表功能的反正切函數構建觀測器,該觀測器能夠降低符號函數在趨近面上快速頻繁切換產生的振蕩,得到較高精度的反電動勢與轉速信息,對BLDCM進行精確控制。通過對速度閉環的控制實現電機穩定運行,根據轉矩與電流關系以及導通時反電動勢與對應相電流的變化情況得出參考電流,通過電流滯環控制方式,實現對電機換相信號的補償,有利于降低電機換相轉矩波動。
1無刷直流電機數學模型
BLDCM系統的數學模型如圖1所示,并假定電機鐵芯未飽和,繞組完全對稱。

根據圖1,可以得到BLDCM的電壓方程為:

式中:R為定子電阻:L為定子繞組自感:皿為定子繞組間互感:e為反電動勢:u為定子電壓:i為定子電流。
將式(1)作差得式(3)所示的線電壓模型:
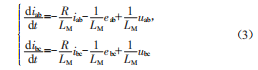
式中:eab、ebc為電機線反電勢,eab=ea-eb,ebc=eb-ec:uab、ubc為電機線電壓,uab=ua-ub,ubc=ub-uc:iab、ibc為相電流差,iab=ia-ib,ibc=ib-ic:LM為等效電感,LM=L-M。
利用式(3)計算出線反電動勢后,可以得出相應的換相邏輯信息。但式中的電流微分將使估算到的線反電動勢與實際值之間有較大偏差,所以,本文通過復制擾動方式對線反電動勢誤差進行補償,實現對線反電動勢的估計,從而提高估算精度。
2無位置傳感器BLDCM控制
2.1改進型滑模觀測器設計
根據狀態變量標準方程,將式(3)中的電流和反電動勢作為系統狀態變量,電壓和電流作為系統的輸入和輸出。電機轉子轉動時,反電動勢變化緩慢,因而可得如下所示的電機狀態方程:

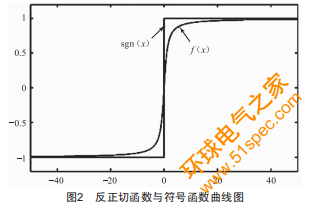
不平滑的符號函數極易使系統產生抖振,所以,本文用具有平滑曲線特性的反正切函數取代符號函數,其表達式為:

該反正切函數曲線如圖2所示。
于是可以得到改進的滑模觀測器:
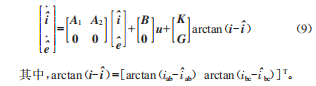
將式(5)減去式(9),得到:
根據變結構理論,要使滑模面穩定,式(10)所示的電流觀測器中應有v'1=EEQ * jc3 * hps10 oal(sup 3(E'i≤0。
即應滿足:
因而滿足此條件的電流觀測器參數為:
當系統進入滑模狀態時,有:

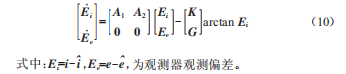
根據式(10),有:

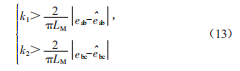
同理,反電動勢觀測器應滿足v'2=E![]() E'e≤0,即:
E'e≤0,即:

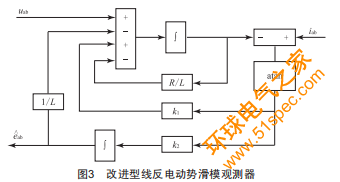
由式(13),滿足式(16)的條件是:

因此,可得到如圖3所示的改進型線反電動勢觀測器。
2.2轉子位置與速度估計
電機旋轉時,在任意時刻,繞組反電動勢大小與轉速成正比,即:

式中:ωe為電機電角速度:ωm為電機機械角速度:Emax=max(|eab|,|ebc|,|eca|)為線反電動勢的最大值:Kω與p分別為電機反電動勢常數和極對數。
而轉子位置是電角速度的積分:

式中:θ0為轉子的初始位置,一般在啟動前將其定位到0o。
至此,利用觀測出的線反電動勢就可計算出電機轉速和位置信息了。
2.3無位置傳感器控制
對BLDCM進行無位置傳感器控制時,不能依靠位置傳感器檢測轉子位置實現正確換相,但可以根據如圖4所示的BLDCM線反電動勢與換相點關系,確定導通相相電流的變化情況。

根據估算出的線反電動勢信號與換相邏輯確定電流流向,如表1所示。其中電流的"+"表示從功率橋流向繞組,"-"表示從繞組流向功率橋,"0"表示繞組無電流流過:sa、sb、sc中的"1"代表驅動對應相功率橋的上橋臂開通,"-1"代表驅動對應相功率橋的下橋臂開通,"0"代表對應相上下橋臂均沒有驅動信號。

2.4電流滯環控制
滯環控制具有實時、快速、瞬態性能好等優點,常被作為控制系統的降頻方法。在無位置傳感器BLDCM的控制策略中,可以根據預期電流與電機實際電流的大小關系,通過電流滯環控制實現對導通相的控制:當相電流大于期望值時,驅動該相的下橋臂導通,從而使該相電流減小:反之,小于期望值時,則驅動該相的上橋臂導通,使該相電流增大。
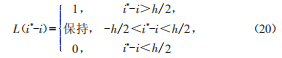
式中:h為電流滯環比較器寬度,該值的大小決定了系統的控制精度,同時也決定了功率橋的開關頻率。
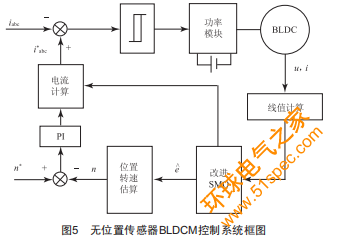
本文設計的BLDCM控制系統中,采用外部速度閉環控制、內部電流滯環控制。根據電機電磁轉矩與電流成正比的關系,從而可將轉速外環控制器輸出值與表1對應的相電流流向結合得到相應的相電流參考值,該值再與實際值進行比較,經滯環控制器后驅動功率模塊的開關管,從而實現BLDCM的無位置傳感器控制,如圖5所示。
3Simulink仿真驗證
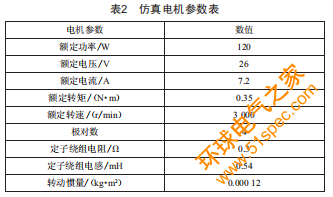
在SmiuSnk環境下搭建系統仿真模型,設置好參數后對傳統滑模觀測器與改進型滑模觀測器的BLDCM控制系統進行仿真比較,所用電機參數如表2所示。
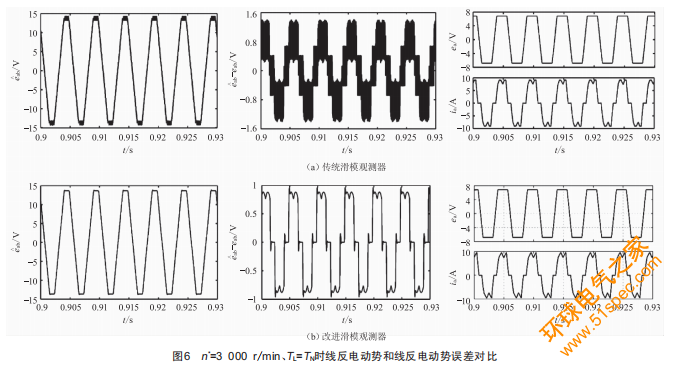
通過仿真調試,取滑模觀測器觀測系數k1=k2=25500,g1=g2=-275000,電流滯環寬度h=0.02A。圖6為額定負載下、給定轉速n*=3000r/min時,傳統滑模觀測器與改進滑模觀測器的仿真結果對比圖。
4結論
本文根據BLDCM傳統滑模觀測器,提出了一種反正切函數的改進型觀測器,推導出了這種觀測器觀測反電動勢的具體表達式,根據電機參數確定了觀測參數,有效地估計了反電動勢信息,并以電流滯環控制取代兩兩導通工作模式,進一步降低了電磁轉矩脈動,獲得了較好的控制性能,實現了極小誤差的快速響應。根據仿真結果,得出的結論有:
(1)當系統參數保持不變時,在較寬的速度范圍內,改進型滑模觀測器都能很好地估算線反電動勢,獲得較高的觀測精度,利用電流滯環控制策略實現電機的正確換相。
(2)與傳統滑模觀測器相比,改進型滑模觀測器所引起的轉矩抖振明顯降低,有利于電機在工作過程中保持良好的穩定性。
(3)對于一個理想的滑模觀測器,控制系統總是能降階、光滑地運動,而且漸近于"滑動模態"區,不會出現抖振。但在實際的滑模變結構控制系統中,由于系統本身的慣性、測量誤差等諸多因素,滑動模態成為在原點有一定抖動的準滑動模態,這種控制方式必定會影響控制系統的精確性,甚至會使系統產生振蕩或失穩,因此,這種抖動的降低與消除也是滑模觀測器進一步應用于工業控制需要解決的首要問題。
下一篇: PLC、DCS、FCS三大控
上一篇: 提高西門子數字式母線


