發布日期:2022-04-18 點擊率:115
某些生產機械,如車床等要求在工作時頻繁的起動與停止;有些工作機械,如起重機的吊勾需要準確定位,這些機械都要求電動機在斷電后迅速停轉,以提高生產效率和保護安全生產。
電動機斷電后,能使電動機在很短的時間內就停轉的方法,稱作制動控制。制動控制的方法常用的有二類,即機械制動與電力制動,下面將這兩種制動方法介紹如下。
一、機械制動
機械制動是利用機械裝置,使電動機迅速停轉的方法,經常采用的機械制動設備是電磁抱閘,電閘抱閘的外形結構如圖21801所示。

電磁抱閘主要由兩部分構成:制動電磁鐵和閘瓦制動器。制動電磁鐵由鐵芯和線圈組成;線圈有的采用三相電源,有的采用單相電源;閘瓦制動器包括:閘瓦,閘輪,杠桿和彈簧等。閘輪與電動機裝在同一根轉軸上.制動強度可通過調整彈簧力來改變。
一)電磁抱閘制動控制線路之一
電磁抱閘制動控制線路之一如圖21802所示:

電磁抱閘制動控制線路的工作原理簡述如下:
接通電源開關QS后,按起動按鈕SB2,接觸器KM線圈獲電工作并自鎖。電磁抱閘YB線圈獲電,吸引銜鐵(動鐵芯),使動、靜鐵芯吸合,動鐵芯克服彈簧拉力,迫使制動杠桿向上移動,從而使制動器的閘瓦與閘輪分開,取消對電動機的制動;與此同時,電動機獲電起動至正常運轉。當需要停車時,按停止按鈕SB1,接觸器KM斷電釋放,電動機的電源被切斷的同時,電磁抱閘的線圈也失電,銜鐵被釋放,在彈簧拉力的作用下,使閘瓦緊緊抱住閘輪,電動機被制動,迅速停止轉動。
電磁抱閘制動,在起重機械上被廣泛應用。當重物吊到一定高度,如果線路突然發生故障或停電時,電動機斷電,電磁抱閘線圈也斷電,閘瓦立即抱住閘輪使電動機迅速制動停轉,從而防止了重物突然落下而發生事故。
二)電磁抱閘制動控制線路之二
采用圖21802控制線路,有時會因制動電磁鐵的延時釋放,造成制動失靈。
造成制動電磁鐵延時的主要原因:制動電磁鐵線圈并接在電動機引出線上(參見圖2-71)。電動機電源切斷后,電動機不會立即停止轉動,它要因慣性而繼續轉動。由于轉子剩磁的存在,使電動機處于發電運行狀態,定子繞組的感應電勢加在電磁抱閘YB線圈上。所以當電動機主回路電源被切斷后,YB線圈不會立即斷電釋放,而是在YB線圈的供電電流小到不能使動、靜鐵芯維持吸合時,才開始釋放。
解決上述問題的簡單方法是;在線圈YB的供電回路中串入接觸器KM的常開觸頭。如果輔助常開觸頭容量不夠時,可選用具有五個主觸頭的接觸器。或另外增加一個接觸器,將后增加接觸器的線圈與原接觸器線圈并聯。將其主觸頭串入YB的線圈回路中。這樣可使電磁抱閘YB的線圈與電動機主回路同時斷電,消除了YB的延時釋放。
防止電磁抱閘延時的制動控制線路如圖21803所示。

二、電力制動
常用的電力制動有電源反接制動和能耗制動兩種。
一)電源反接制動
電源反接制動是依靠改變電動機定子繞組的電源相序,而迫使電動機迅速停轉的一種方法。
(一)單向反接制動控制線路
單向運轉反接制動控制線路如圖21804所示。

起動時,閉合電源開關QS,按起動按鈕SB2,接觸器KM1獲電閉合并自鎖,電動機M起動運轉。當電動機轉速升高到一定值時(如100轉/分),速度繼電器KS的常開觸頭閉合,為反接制動作好準備。
停止時,按停止按鈕SB1(一定要按到底),按鈕SB1常閉觸頭斷開,接觸器KM1失電釋放,而按鈕SB1的常開觸頭閉合,使接觸器KM2獲電吸合并自鎖,KM2主觸頭閉合,串入電阻RB進行反接制動,電動機產生一個反向電磁轉矩,即制動轉矩,迫使電動機轉速迅速下降;當電動機轉速降至約100轉/每分鐘以下時,速度繼電器KS常開觸頭斷開,接觸器KM2線圈斷電釋放,電動機斷電,防止了反向起動。
由于反接制動時,轉子與定子旋轉磁場的相對速度接近兩倍的同步轉速,故反接制動時,轉子的感應電流很大,定子繞組的電流也隨之很大,相當于全壓直接起動時電流的兩倍。為此,一般在4.5KW以上的電動機采用反接制動時,應在主電路中串接一定的電阻器,以限制反接制動電流,這個電阻稱為反接制動電阻,用RB表示,反接制動電阻器,有三相對稱和兩相不對稱兩種聯結方法,圖21804為對稱接法,如某一相不串電阻器,則為二相不對稱接法。
串接的制動電阻RRB的阻值可用下式計算
RRB=KUΦ/Ist(Ω)
式中:RRB為反接制動電阻器的阻值,單位為歐姆(Ω);
UΦ為電動機繞組的相電壓,單位為V;
Ist為電動機全壓起動電流,單位為A;
K為系數,如果要求反接制動的最大電流等于全壓起動電流,K取0.13;如果要求反接制動最大電流為全壓起動電流的一半,K取1.5。
若反接制動時,僅在兩相的定子繞組中串接制動電阻,則選用的制動電阻的數值應為上式計算值的1.5倍。
不頻繁起動時,反接制電阻的功率為:
PR=1/4In2RRB(In為電動機額定電流,其單位為A)
頻繁起動時,反接制動電阻的功率為:
PR=(1/3—1/2)In2RRB
例如:一臺4極鼠籠型電動機,額定功率為20KW,額定電流為38.4A,額定電壓為380V,定子繞組為星接,問采用反接制動時,應串聯RRB的阻值和功率為多少?
從機電產品樣本上查得IST為228A(若無產品樣本,則可取IST=(4—7)In,一般取中間值)。
RRB=1.5×220/228=1.4Ω
PR=1/3In2RRP=1/3×38.42×1.4=164W
圖21804控制回路的接線步驟如下:
(1)首先接FU2和FR:由FR常閉接點引出的線為電源1;由另一個FU2引出的線為電源“2”。
(2)將“1”線分別接在KM1、KM兩線圈上;將線圈的另一端接至“對方的常閉觸頭”上;KM1的空常閉接點與速度繼電器KS的常開接點相連接,KS的空接點與KM2常開接點連接,并由剛接過線的KM2常開接點引出“KM2的線圈線”接至按鈕SB1右側常開接點上,從KM2的空常開接點引出兩根線,一根為“KM2的自鎖線”接至按鈕SB1的左側常閉接點上;另一根接至FU2(即電源線“2”)。
(3)從KM2空閑常閉接點引出一長一短兩根導線,短線接KM1的常開接點,長線為“KM1線圈線”接至按鈕SB2左側常開接點;從KM1的空常開接點引出“KM1的自鎖線”,接按鈕SB2右側常開接點。
(4)按鈕開關中:將右側的SB1常閉接點與SB2常開接點用導線相連;將左側的SB1常開接點與常閉接點用導線連接。
(5)將主回路及控制回路的所有連接線全部仔細檢查一遍,確認無誤后,送電試機。
(二)可逆起動反接制動控制線路
1、電動機可逆起動反接制動的控制線路之一
電動機可逆起動反接制動的控制線路之一,如圖21805所示。該控制線路由于主回路中沒有限流電阻RB,所以只能用于容量較小的電動機。

圖中KS—1和KS—2分別為速度繼電器正反兩個方向的兩副常開觸頭,當按下SB2時,電動機正轉,速度繼電器的常開觸頭KS—2閉合,為反接制動作準備,當按下SB3時,電動機反轉,速度繼電器KS—1閉合,為反接制動作準備。中間繼電器KA的作用是:為了防止當操作人員因工作需要而用手轉動工件和主軸時,電動機帶動速度繼電器KS也旋轉;當轉速達到一定值時,速度繼電器的常開觸頭閉合,電動機獲得反向電源而反向沖動,造成工傷事故。
圖21805控制線路的工作原理,簡述如下:
閉合電源開關QS后按SB2,接觸器KM1獲電閉合并通過其自鎖觸頭自鎖,電動機M正轉起動,當電動機轉速高于120轉/每分鐘時,KS—2閉合,為反接制動作準備。
當需要正轉停止時,按SB1,接觸器KM1斷電釋放而中間繼電器KA獲電吸合并自鎖;KA的常開觸頭斷開,切斷KM2自鎖觸頭的供電回路,使其不能自鎖;KA的常開觸頭接通KM2的線圈回路,使KM2獲電吸合,此時反接制動開始,當電動機的轉速降至約100轉/每分鐘時,速度繼電器KS—2斷開,使KM2斷電釋放,在中間繼電器自鎖回路中的常開觸頭KM2斷開,使中間繼電器KA也失電釋放。
反轉的起動及反接制動的工作原理與上述相似,不再贅述。
可逆起動反接制動的控制線路之一的參考接線步驟如下:
(1)首先接好電源FU2及熱繼電器FR常閉觸頭,引出控制電源“1”與“2”。
(2)將電源“1”接至三個線圈的一端。接觸器KM1與KM2的線圈空閑端分別接至對方的常閉觸頭;從KM1、KM2的兩個空常閉觸頭各引出一長一短兩根線,其中兩根短線接至對方的常開觸頭,兩根長線為兩個接觸器各自的線圈線,其中從KM2常閉引出的長線為“KM1的線圈線”,接至SB2左側常開接點;從KM2常閉引出的長線為“KM2的線圈線”,接至SB3左側常開接點。
(3)將KM1、KM2剛接過線的常開觸頭的空接點,與KA的常閉觸頭用導線連接,并引出一根長線作為“KM1與KM2的共自鎖線”接到SB2(或SB3),右側常開接點;從KA常閉接點的空閑端點引出一根長線,接至SB1右側常閉接點;從KA線圈的空接點引出兩短一長共三根線,短線分別接KM1、KM2未接過線的常開接點,長線作為“KA的線圈線”接至SB1左側常開接點,將剛接過線的KM1、KM2的兩個空常開接點與KA的常開接點連接,將剛接過線的KA常開空觸頭與另一個KA常開觸頭連接,并從此點引出一長一短兩根導線,其中短線與電源“2”連接,長線作為“電源線”接至SB1右側常開(或左側常閉)接點上。
(4)從剛接過線的KA常開空接點引出一根長線接至速度繼電器KS的兩個常開觸頭,將KS-1,KS-2的空接點與KM1、KM2的線圈線連接。此處注意KS-1與KM1線圈線連接,KS-2與KM2線圈線連接。如果KS與按鈕開關較近,則將KS的引出線接至按鈕開關SB2、SB3的左側常開接點;如果KS與接觸器KM1、KM2較近,則將KS的引出線接至KM1、KM2的常開自鎖觸頭上(與常閉觸頭交叉相連的一端)。
(5)將SB1左側常閉與右側常開兩接點相連接;將SB2與SB3右側常開的兩接點相連接。
(6)檢查所有的接線,確認無錯漏后,送電試機。
2、可逆起動反接制動控制線路之二
可逆起動反接制動控制線路之二如圖21806所示。
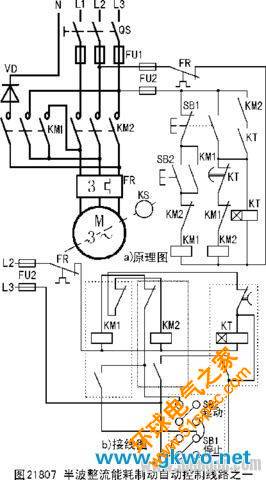
圖21806這個控制線路主要由三個接觸器KM1、KM2、KM3、四個中間繼電器KA1、KA2、KA3、KA4;速度繼電器KS;反接制動電阻RB;正轉按鈕SB2;反轉按鈕SB3及停止按鈕SB1;電源開關QS;熔斷器FU1與FU2;熱繼電器FR等組成。
圖21806的工作原理簡述如下:
先合上電源開關QS,按正轉按鈕SB2,KA1獲電吸合并通過KA1-2閉合自鎖,KA1-1斷開,閉鎖了KA2;KA1-4閉合為KM3線圈獲電作準備;KA1-3閉合使KM1獲電吸合,KM1常閉觸頭斷開,閉鎖了KM2;KM1常開觸頭閉合為KA3獲電作準備;KM1主觸頭閉合,電動機串電阻RB降壓起動,當電動機轉速上升到使KS-1閉合后,KA3獲電吸合,KA3-1閉合為KM2線圈獲電作準備;自鎖觸頭KA3-2閉合自鎖;KA3-3閉合使KM3獲電吸合,KM3主觸頭閉合短接了電阻RB,電動機獲全壓正常運轉。
需停止時按SB1:KA1失電釋放,KA1-1及KA1-2均恢復原始狀態;KA1-4斷開使KM3斷電釋放,電阻RB解除短接,串入主回路;KA1-3斷開使KM1斷電釋放,使電動機失電作慣性轉動;同時KM1常閉觸頭恢復閉合,使KM2獲電吸合,其主觸頭閉合,電動機反接制動(串電阻RB),當電動機轉速低到約每分鐘100轉時,KS-1斷開使KA3斷電釋放,其觸頭均恢復原始狀態,其中KA3—1斷開后使KM2斷電釋放,電動機反接制動過程結束。
相反方向的起動和制動的原理與上述相似,不在贅述。
圖21806控制電路中,由于主回路串接了電阻RB,限制了反接制動電流,又能限制起動電流,所以該線路可以用在電動機功率較大的場所。該線路所用電器較多,造價較高,但其運行確實安全可靠,操作也非常方便,電動機在運轉時,如需換向運行,只要按動相應的起動按鈕,電路便自動完成電動機的斷電→串電阻反接制動→電動機轉速近于零→串電阻限流換向起動→換向正常運行的全部過程。不必先按停止按鈕,這樣即簡化了操作手續,又提高了電路的反應速度,且制動力很強,所以是一個比較完善的電路。該線路也有一些缺點:如所用電器較多,相應線路較復雜,且造價較高,在制動過程中沖擊較大,故此,該線路適用于制動要求迅速,系統慣性較大而且制動不太頻繁的場所。
二)能耗制動
三相鼠籠式異電動機的能耗制動,就是把轉子儲存的機械能轉變成電能,又消耗在轉子上,使之轉化為制動力矩的一種方法。
將正在運轉的電動機從電源上切除,向定子繞組通入直流電流,便產生靜止的磁場,轉子繞組因慣性在靜止磁場中旋轉,切割磁力線,感應出電動勢,產生轉子電流,該電流與靜止磁場相互作用,產生制動力矩,使電動機轉子迅速減速、停轉。
這種制動所消耗的能量較小,制動準確率較高,制動轉距平滑,但制動力較弱,制動力矩與轉速成正比地減小。還需另設直流電源,費用較高。
能耗制動適用于要求制動平穩、停位準確的場所,如銑床;龍門刨床及組合機床的主軸定位等。
(一)無變壓器半波整流能耗制動
1、無變壓器半波整流能耗制動的自動控制線路之一
無變壓器半波整流能耗制動的自動控制線路之一,如圖21807所示:
圖21807的工作原理如下:
閉合電源開關QS,按起動按鈕SB2,接觸器KM1線圈獲電吸合并自鎖,電動機起動運行。
停止時,將停止按鈕SB1按到底,使其常開觸頭可靠閉合,其常閉觸頭斷開,使KM2斷電釋放,電動機斷電作慣性旋轉。其常開觸頭閉合,使時間繼電器KT和接觸器KM2獲電吸合并自鎖。電動機進入半波整流能耗制動,待過了預先整定的時間后(此時電動機已停轉),KT的延時斷開常閉觸頭斷開,切斷KM2線圈回路,使KM2斷電釋放,KM2斷電后其常開觸頭KM2斷開,使KT也失電釋放,整個電路恢復至原始狀態。
圖21807的接線較簡單,可直接按接線圖接線。
2、無變壓器半波整流能耗制動自動控制線路之二
無變壓器半波整流能耗制動自動控制線路之二如圖21808所示:
圖21808電路的主回路與圖21807完全相同,如果需要,請參閱圖21807。圖21808中的KM1是電動機運行用接觸器,KM2為電動機制動用接觸器,KT為斷電延時型時間繼電器,用來控制制動時間。
起動時按SB2,KM1與KT同時獲電吸合并自鎖,KM1獲電吸合,使電動機獲電運轉;KT獲電吸合,其常開延時釋放觸頭瞬間閉合,為KM2獲電作好準備。
停止時,按SB1,KM1、KT同時斷電釋放,KM1釋放使電動機失電,電動機憑慣性而繼續旋轉,KT斷電使其常開觸頭KT進入延時釋放時刻,待過了預定時間后(此時電動機已停轉),KT常開觸頭斷開,切斷KM2線圈回路,KM2失電釋放,制動過程結束,整個電路恢復至原始狀態。
圖21808控制線路的接線較簡單,可直接按照接線圖接線。

3、無變壓器半波整流能耗制動手動控制線路
無變壓器半波整流能耗制動手動控制線路如圖21809所示。

圖21809的主回路與21806中的主回路完全相同,此處略去。圖中KM1為運行用接觸器,KM2為制動用接觸器,SB2為起動按鈕,SB1為停止兼制動按鈕。(http://www.diangon.com版權所有)
起動時,按起動按鈕SB2,KM1獲電吸合并自鎖,電動機起動運行。需停止時,將停止按鈕SB1按到底,且暫不松手,這時KM1斷電,而KM2獲電,電動機進入制動狀態,當電動機停轉后,立即松開停止按鈕SB1,制動結束。
圖21809的接線較簡單,可參照其接線圖直接進行。
該制動線路簡單,所有電器元件少,但其功能較差而且不能準確定位,如果對準確定位要求較嚴,請采用下面的準確定位控制線路。
4、半波整流能耗制動準確定位控制線路
半波整流能耗制動準確定位控制線路如圖21810所示。

圖21810的主回路部分可參閱圖21807。
圖21810中,KM1控制電動機的運行;KM2控制電動機的制動;斷電延時型時間繼電器KT控制制動時間;SQ為限位開關,控制運動部件的行程。
起動時,按起動按鈕SB2,接觸器KM1獲電吸合后,電動機轉動,拖動機床的運動部件(如進刀機構)運動,到達預定位置時,觸及限位開關SQ,其常閉觸頭斷開,接觸器KM1和時間繼電器KT均斷電釋放,同時限位開關SQ的常開觸頭閉合(此時KM1的常閉觸頭已恢復閉合),接通了KM2的線圈回路,使KM2獲電吸合,電動機進行能耗制動。當KT到達預先整定的時間時,其延時常開觸頭斷開,切斷KM2的線圈回路,使KM2失電釋放,電動機制動結束,整個電路恢復至原始狀態。
這種控制線路適用于機床進給機構或其它要求準確定位的場所。
圖21810的接線較簡單,但是須注意限位開關SQ,如距離按鈕開關較近而距離接觸器中的電源較遠時按接線圖中的實線接線,反之則按接線圖中的虛線接線,其余接線步驟省略。
(二)、有變壓器的全波整流能耗制動控制線路
有變壓器的全波整流能耗制動線路如圖21811所示。
圖中:KM1為電動機正常運行用接觸器;KM2為制動用接觸器,它需有四個主觸頭,如果一個接觸器的主觸頭數量不夠,可用兩個接觸器代替;KT為通電延時型時間繼電器,用來控制制動時間;T為降壓變壓器;VC為橋式整流器,由四只二極管組成;RP為滑線式變阻器,用來調整制動電流;FU3為變壓器T的短路保護熔斷器。
圖21811中的控制部分原理及接線與圖21807相同,請參閱圖21807各有關說明。
能耗制動所需要的直流電壓Uz和直流電流Iz可分別用下列兩個公式計算:
Uz==Iz.R(單位:Uz為V;Iz為A;R為Ω)
Iz==(3.5—4)I0或Iz==1.5In
式中:Uz—-直流電壓(V);
Iz——直流電流(A);
R—-直流電壓所加定子繞組兩端的冷態電阻,即溫度為15C0時的電阻(Ω)
I0—電動機空載時的線電流(A);
In—電動機的額定電流。
單向橋式全波整流時,能耗制動所需要的電源變壓器二次交流電壓Uz和電流Iz為:
U==1.11Uz;Iz==1.11Iz
變壓器所需的容量S(伏安)為:S==Iz×Uz
例如,一臺三相鼠籠式異步電動機,額定功率為13千瓦,額定電壓為380V,額定電流為25A.空載電流為9.7A,定子繞組為星形,用電橋測得二相定子繞組的電阻為0.64Ω,求這臺電動機采用全波整流能耗制動時所需的直流電壓、直流電流,變壓器的二次電壓及容量各為多少?
解:Iz=(3.5—4)I0取:Iz=4I0=4×9.7=38.8A
Uz=IzR=38.8×0.64≈25V
變壓器的次級電壓為:U2=1.11Uz=1.11×25≈28V
變壓器的次級電流為:I2=1.11Iz=1.11×38.8≈43A
變壓器的容量為:
S=I2U2=43×28≈1200VA
在設計或選用整流變壓器時,可選用在10%處有抽頭的變壓器,以利調整。
能耗制動較反接制動的優點是制動準確、平穩、能量消耗少;缺點是需附加直流電源裝置,制動力較弱,在低速時制動轉距小。能耗制動一般用于制動要求平穩、準確的場所,如磨床、龍門刨床等控制線路中。
(三)短接制動控制線路
短接制動是在電動機定子繞組上的供電電源斷開的同時,將定子繞組自行短接,這時電動機轉子因慣性仍在旋轉。由于轉子存在剩磁,形成了轉子旋轉磁場,此磁場切割定子繞組,在定子繞組中產生感應電動勢。因定子繞組此時已被KM2(或KM1常閉觸頭)短接,所以在定子繞組中產生感應電流,該電流與旋轉磁場相互作用,產生制動轉距,迫使電動機停轉。
1、短接制動控制線路之一
短接制動控制線路之一如圖21812所示:

在制動過程中,由于定子繞組短接,所以繞組端電壓為零。在短接的瞬間產生瞬間短路電流。短路電流的大小取決于剩磁電動勢和短路回路的阻抗。雖然瞬間短路電流很大,但電流呈感性,對轉子剩磁起去磁作用,使剩磁電勢迅速下降,所以短路電流持續時間很短。另外,瞬時短路電流的有功分量很小,故制動作用不太強。所以,這種制動方法只限于小容量的高速異步電動機以及制動要求不高的場所。
當電動機的容量較小時,可采用圖中虛線所示電路,即用KM1的常閉輔助觸頭取代接觸器KM2,此時的控制線路改用圖20402中的控制線路。
2、短接制動控制線路之二
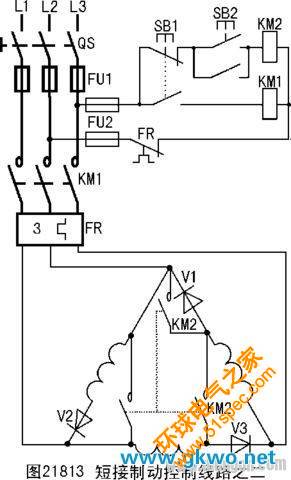
短接制動控制線路之二如圖21813所示:
圖21813所示的控制線路適用于正常運行為三角形接法的電動機。在電動機三相定子繞組中每相串接一個整流二極管。電動機正常運行時,接觸器KM1、KM2都獲電吸合,KM2觸頭短接二極管。當需要停車時,按停止按鈕SB1,KM1和KM2均斷電釋放,二極管串入繞組工作。電動機轉子有剩磁,且在慣性作用下繼續旋轉,轉子剩磁磁場切割定子繞組,產生定向的感應電流。定子感應電流與轉子的旋轉磁場相互作用,產生制動力矩,迫使電動機停轉。
圖21812及圖21813中,請讀者自補接線圖。這兩個圖非常簡單,也可以不畫接線圖,按照原理圖直接連接。
短接制動的優點是簡單易行,無需特殊的控制設備。制動時,定子的感應電流比電動機空載起動時的電流要小。
短接制動的缺點是:制動作用不強,定位不準確,且僅適用于小容量的高速電動機。
(四)電容制動
電容制動是將工作著的異步電動機在切斷電源后,立即在定子繞組的端線上,接入電容器而實現制動的一種方法。
電容制動控制線路如圖21814所示:

三組電容器可以接成星形或三角形,與電動機定子出線端形成閉合回路。當運行的電動機斷開電源時,轉子內的剩磁切割定子繞組產生感應電動勢,并向電容充電,其充電電流在定子繞組中形成勵磁電流,建立一個磁場,這個磁場與轉子剩磁相互作用,產生一個與旋轉方向相反的制動力矩,使電動機迅速停轉,完成制動.
電容制動控制線路的工作原理如下:
起動過程,閉合電源開關QS并按下起動按鈕SB2,接觸器KM1獲電吸合并經KM1-1常開觸頭自鎖,KM1-2常閉觸頭斷開,閉鎖了KM2;接觸器KM1的主觸頭閉合,電動機獲電運轉;KM1-3閉合使時間繼電器KT獲電吸合,KT的延時斷開常開觸頭瞬間閉合,為KM2獲電作準備。需要停車時,按下停止按鈕SB1使接觸器KM1斷電釋放,KM1主觸頭、常開觸頭KM1-1KM1-3、常閉觸頭KM1-2、均恢復至原始狀態。其中KM1-2聯鎖觸頭恢復閉合時,接觸器KM2獲電吸合,KM2主觸頭閉合,將三相制動電容器及電阻R1、R2接入定子繞組,電動機被制動,直至停轉;同時,KM1-3的斷開使時間繼電器KT失電釋放,其延時斷開常開觸頭延時至電動機停止后,自動斷開,切斷接觸器KM2線圈回路,使接觸器KM2失電釋放。至此,全部電器均恢復至原始狀態。
控制線路中的電阻R1是調節電阻,用以調節制動力矩的大小,電阻R2為放電電阻。對于380伏、50赫茲的鼠籠式異步電動機,根據經驗,每千瓦每相大約需150微法的制動電容,電容的工作電壓應不小于電動機的額定電壓。
電容制動的方法對高速、低速運轉的電動機均能迅速制動,能量損耗小,設備簡單,一般用于10千瓦以下的小容量電動機,并且可用于制動較頻繁的場所
(五)發電制動
發電制動又稱為再生制動或回饋制動。
在電動機工作過程中,由于外力的作用,如起重機在高處下降重物時,可使電動機的旋轉速度n2超過定子繞組旋轉磁場的同步轉速n1。現假定旋轉磁場不動,則轉子導體將以n2減n1的轉速切割磁力線,使電動機轉變成發電機運行。將重物的位能轉變為電能反饋給電網,所以這種制動方法稱為發電制動。
發電制動的經濟效益好,可將負載的機械能量變換成電能反送到電網上,發電制動的不足之處是應用范圍窄,僅當電動機實際轉速大于同步轉速時才能實現制動。發電制動常用于起重機械和多速異步電動機。如使電動機轉速由二級變為四級時,定子旋轉磁場的同步轉速由每分鐘3000轉,變為每分鐘1500轉,而轉子由于慣性,仍以原來的大約每分鐘2900轉的速度旋轉,此時n大于n1,電動機產生發電制動作用。
有關電動機的制動,我們已介紹了兩大類,十多種控制線路。讀者在今后的實際工作中,應根據工作現場的實際情況以及經濟條件等因素,靈活地選用這些制動控制線路。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV

型號:82344715
價格:¥1
庫存:10
訂貨號:82344715

型號:6FC8506-1RX01-0AA0
價格:面議
庫存:10
訂貨號:6FC8506-1RX01-0AA0
型號:6FC8506-0EX03-1AA2
價格:面議
庫存:10
訂貨號:6FC8506-0EX03-1AA2
型號:6FC8506-2EX00-0AA0
價格:面議
庫存:10
訂貨號:6FC8506-2EX00-0AA0
型號:6FC8506-0EX08-6AA2
價格:面議
庫存:10
訂貨號:6FC8506-0EX08-6AA2
型號:6FC8506-2RX08-0AA0
價格:面議
庫存:10
訂貨號:6FC8506-2RX08-0AA0


