當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:152
什么是仿生機器人
“仿生機器人”是指模仿生物、從事生物特點工作的機器人。目前在西方國家,機械寵物十分流行,另外,仿麻雀機器人可以擔任環境監測的任務,具有廣闊的開發前景。二十一世紀人類將進入老齡化社會,發展“仿人機器人”將彌補年輕勞動力的嚴重不足,解決老齡化社會的家庭服務和醫療等社會問題,并能開辟新的產業,創造新的就業機會。”
仿生青蛙機器人設計
青蛙跳躍具有爆發性強、距離遠的特點,能夠輕松越過障礙,并且具有很好的環境適應性。其生物體結構和行為方式合理、靈活、高效。基于對青蛙生物特征和跳躍運動機理的分析,對于復雜的結構進行簡化,提出了一種面向跳躍運動的機構模型,并進行仿生青蛙的設計。
1.研究背景及意義
1.1國外研究水平
加拿大麥吉爾大學分析了柔性機器人的控制算法,模仿動物利用肌肉、腱等彈性儲能元素來降低耗能,研制了具有柔性髖關節和腿的單腿跳躍機器人,跳躍速度可達1.25m/s,而驅動功率僅48W。
美國斯擔福大學和俄亥俄州大學合作,通過研究各種動物奔跑的運動步態和動力學特性,以動物運動時耗能小,腿部彈性儲能和低慣量為目標,研制出了一種機器人。
日本東京工業大學科學家通過分析貓在爬墻過程中,仿造其半身的結構,研制了一種機器貓,其跳躍動作不追求運動中整體達到的高度,而是像貓那樣通過四肢的協調動作越過障礙物。
1.2國內研究水平
哈爾濱工業大學通過分析蝗蟲起跳的運動原理,對生物模型進行簡化,建立了機器人理論模型,并從運動學和動力學進行分析,最終設計了二套分別基于電機和電磁鐵驅動的樣機,并進行了實驗研究。
上海交大模仿人體下肢設計了關節彈性步行機構。他們在機器人的小腿中安置了彈性裝置,通過四組并聯彈性元件和機器人腿外殼為機架的四連桿機構的復合,使機構產生了緩沖,儲能效果。
西北工業大學分析了袋鼠的生物形態和運動機理,提出了具有柔性腳趾的仿生袋鼠機器人機構模型,對機器人著地和騰空的兩個階段進行了運動學及動力學分析,并研究了全跳躍周期關節空間的軌跡規劃,為袋鼠機器人的實現,解決其跳躍、彈跳動力等關鍵技術奠定了理論基礎。
1.3常規跳躍機器人
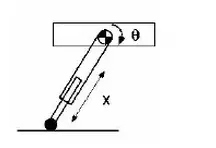
麻省理工學院腿實驗室的Raibert教授于1980年研制了世界上第一個以連續跳躍方式運動的單腿機器人,機器人的運動被限制在一個平面內,腿部裝有氣缸,作用相當于彈簧,因此它在地面上的運動類似于一個帶彈簧的倒立擺角。其基本運動模型如圖所示,機構有一個X方向的平移自由度以及足部和軀體之間的旋轉自由度e,其跳躍與落地過程經過運動學與動力學分析和計算后,只要按規律外加控制就可保持連續穩定的跳躍運動,M.H.Raibert專門著書論述了這一模型。此外,很多學者從各個角度對類似機構進行了數學分析與仿真。目前對Raibert跳躍模型的研究集中于如何對這種非完整約束系統進行平衡控制上。
1.4一般青蛙機器人
美國麻省理工學院Raibert教授等人研制了多種仿生步行或爬行機器人。其中有兩種可跳躍前進的腿型機器人。一種是二維跳躍機器人Uniroo}42},其腿部結構類似于袋鼠的后肢,如圖所示。機器人共有四個關節,即尾關節、骸關節、膝關節和踩關節,它們分別由四個液壓缸驅動并控制實現系統的跳躍及平衡,側向借助連接在地面上的桿件保持穩定。另一種是三維跳躍機器人3DB1peCl}43,44],如圖1-12所示。其骸關節具有兩個自由度,腿部長度由氣缸控制。機器人單腿動態平衡控制系統由三部分組成:一部分控制機構的前進速度,一部分控制機體與金屬腿之間的角度,另一部分控制彈跳高度。該機器人具有很好的平衡性和運動穩定性,能夠實現跑、跳、甚至空翻等動作。

1.5意義
當今世界,科技發展水平日益進步,機器人研究領域已經向航空航天、水面水下、地下管道等環境發展,未來的機器人將在人類無法工作的環境中代替人類工作,人們要求機器人不僅適應原來的基本要求,還要適應未知的環境,這就對機器人的運動靈活性、適應性、生存能力很高。
移動性能是未來機器人在許多場合的關鍵能力,為了完成任務,常常要求機器人能夠到人們無法進入的禁區進行偵查、探測,、攻擊,、干擾等行動。我們設計的仿生青蛙,運用了跳躍的運動方式,能夠適應不同地表,實現跨越溝渠和障礙,活動范圍廣,躲避風險能力和生存能力強,擁有極強的移動能力,因此能夠代替人們到達不可預測的環境中進行各種活動,完成任務。
青蛙跳躍具有爆發性強、距離遠的特點,能夠輕松越過障礙,并且具有很好的環境適應性。其生物體結構和行為方式合理、靈活、高效。基于對青蛙生物特征和跳躍運動機理的分析,對于復雜的結構進行簡化,提出了一種面向跳躍運動的機構模型,并進行仿生青蛙的設計。青蛙前肢簡化為一個主動肩關節和一個被動肘關節,從而實現其著路支撐緩沖和姿態調整的功能。后肢采用五桿機構作為腿部主體,并增加腳掌以保證其穩定性。后肢通過電機控制實現跳躍動作,具有較大的可行性,后肢五桿機構具有與青蛙跳躍時相識的力學規律,從而實現很好的跳躍功能。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


